ESCs
The ESC (Electronic Speed Controller) controls the RPM of each motor based on commands from the flight controller (FC). Every motor has its own ESC, which converts FC signals into precise pulses for a brushless motor. FPV builds use three main ESC form factors: 4-in-1 ESCs, AIO boards with integrated ESCs, and individual ESCs. When choosing an ESC, match the maximum current rating (it must exceed the motor’s peak draw) and the supported voltage (it must handle your battery). Underspecced ESCs can overheat or burn out. Also important are the mounting pattern and connector compatibility with your FC.
Typical ballpark ratings:
- 5–12 A — TinyWhoops, 0703–0802 motors (1–2S)
- 12–20 A — 2–3″ quads, 1104–1108 motors (2–4S)
- 20–40 A — 3–4″ quads, 1404–2204 motors (3–6S)
- 40–60 A — 5–7″ quads, 2206–2408 motors (4–8S)
- 80 A+ — cinelifters and 10–15″ long-range platforms (6–8S)
4-in-1 ESCs
The most common solution today is the 4-in-1 ESC — four ESCs on one board. Standard mounting patterns are 30.5×30.5 mm (for 5–10″) and 20×20 mm (for 2–5″). They sit in the stack with the FC and are connected via wiring harness or board-to-board connector. This saves space, reduces weight and simplifies wiring. The current rating listed on a 4-in-1 applies per channel.
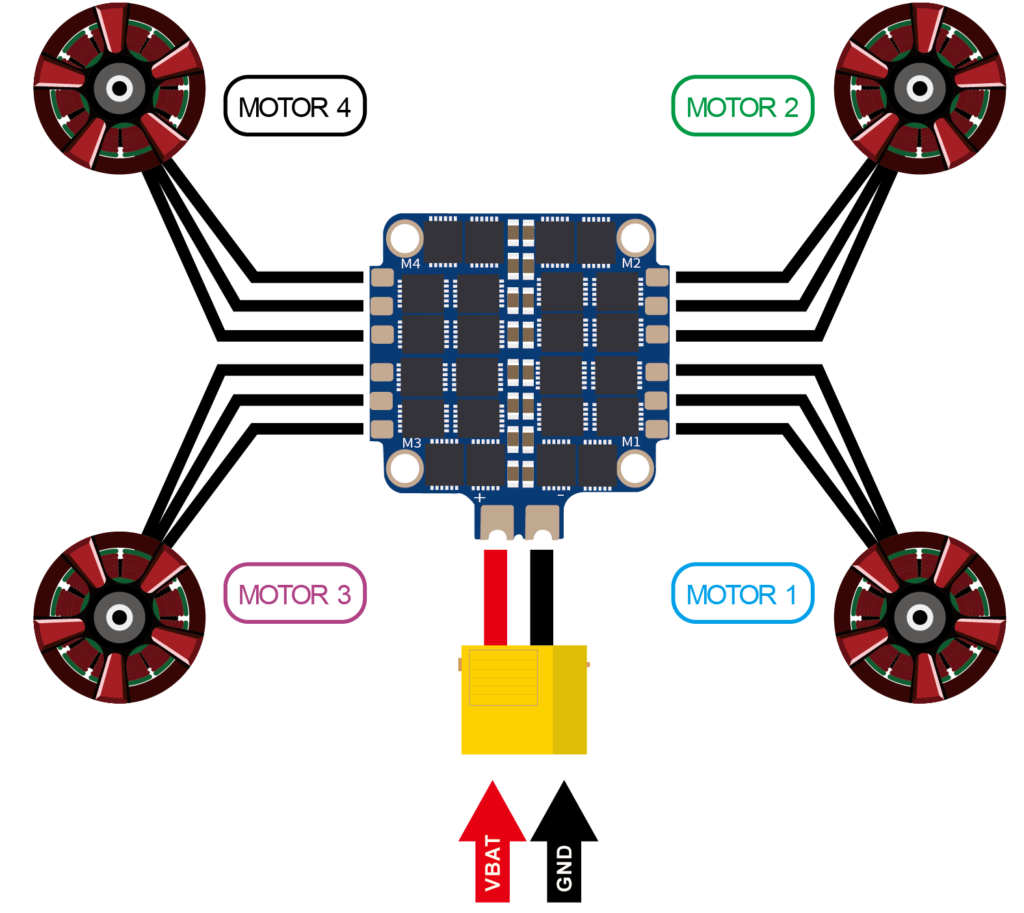
When using a stack, always verify the ESC-to-FC connector pinout, as it varies by brand. Modern 4-in-1s often include a current sensor and sometimes telemetry circuits that send voltage, current and temperature to the FC.
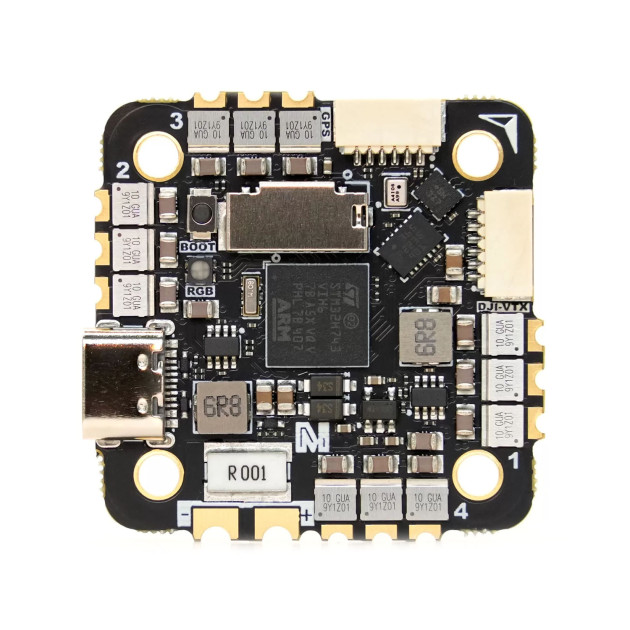
AIO boards
AIO (All-in-One) boards combine the flight controller and ESCs on a single PCB. They’re common on TinyWhoops, toothpicks and other lightweight micro quads where space and weight are critical. Typical mounting is 25.5×25.5 mm or 26×26 mm with current ratings around 5–45 A. A downside is that ESC damage usually means replacing the whole board. AIOs are not ideal for powerful 5″+ builds.
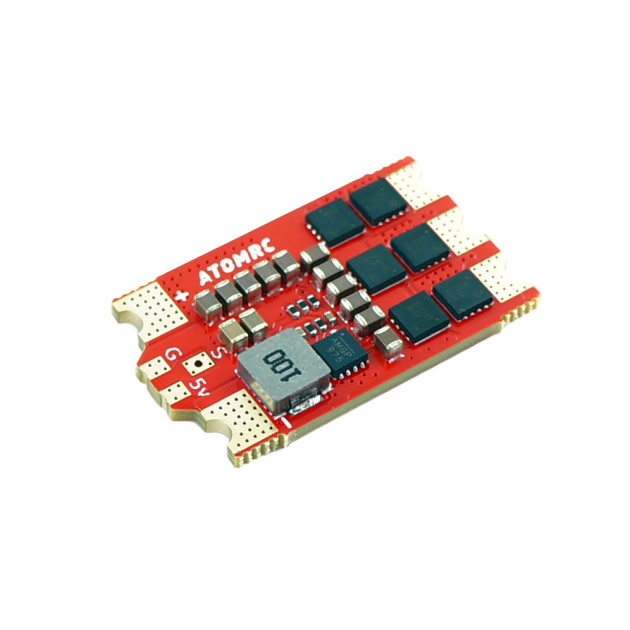
Individual ESCs
Single ESCs are used mainly on fixed-wing (one motor) and on large quads (15″+) where current exceeds 4-in-1 capability. On such big rigs, four high-power ESCs on one board are hard to cool. Some ESCs integrate a BEC (regulated 5/6 V output) — useful on planes without an FC to power the receiver and servos.
The benefit of singles is easy swap-out if one fails; the trade-offs are more weight and messier wiring.

Other ESC features
Many ESCs include a current sensor and send telemetry to the FC. It’s common to add an external electrolytic capacitor at the ESC/battery leads to suppress voltage spikes from rapid RPM changes — this significantly extends the life of the ESC and other electronics.

ESCs often integrate a TVS diode to protect against over-voltage during hard braking. Proper capacitors and surge protection are especially important on 6S and 8S builds where transients are high.
ESC protocols
The ESC protocol defines how the FC communicates with the ESC and how quickly commands become motor RPM. These evolved from slow analog signalling to today’s digital links.
The oldest motor control is classic PWM (Pulse Width Modulation) — pulse length encodes throttle. It’s slow and needs calibration, and today is mostly used on fixed-wing without an FC (receiver drives ESC directly). Later came OneShot125, OneShot42 and MultiShot, which sped things up dramatically. These are analog pulse-timing protocols and are now uncommon on FPV quads.
Today’s standard is DShot (Digital Shot), a digital protocol from FC to ESC. Instead of pulse length, DShot transmits a digital frame with command and a CRC, making the link more accurate, faster and noise-resistant.
DShot speeds include DShot150, DShot300, DShot600 and DShot1200 (kbit/s). Modern ESCs also support bidirectional DShot, where the ESC reports motor RPM and voltage back to the FC. This enables the RPM filter in the FC’s gyro filtering, greatly improving flight stability and vibration rejection.
DShot also brings perks: no throttle-range calibration, on-the-fly motor direction changes, motor beeping to find a lost quad, and ESC diagnostics. Thanks to its precision and robustness, DShot is the dominant standard in FPV.
There are niche digital variants — e.g., ProShot (DShot/PWM hybrid) and FDShot (Fast Digital Shot) — with even lower latency but limited support. For most builds, DShot300 or DShot600 is the sweet spot for precision and reliability.
Firmware
Every ESC needs firmware that defines motor control and protocol support (e.g., DShot, OneShot). Common choices are BLHeli_S, BLHeli_32, Bluejay and AM32. ESC firmware can be updated and configured via PC. You can bridge via the quad’s FC (Betaflight, INAV, ArduPilot) or use a USB adapter for stand-alone ESCs on fixed-wing. A dedicated chapter will cover ESC setup.

BLHeli_S
BLHeli_S is a widely used open-source firmware for FPV. It runs on an 8-bit MCU and is known for stability and reliability. It provides smooth motor drive, easy setup and supports DShot150–DShot600. A limitation is no native bidirectional DShot.
BLHeli_32
BLHeli_32 targets 32-bit ARM MCUs. It offers finer control, ESC telemetry (voltage, current, temperature), bidirectional DShot (RPM) and detailed tuning. It’s commercial (not open-source) but has been the standard for high-performance quads. In spring 2024 its development ceased for geopolitical reasons. Some ESCs still ship with BLHeli_32, but the firmware can’t be updated. Occasional pre-release test builds exist and require BLHeliSuite32 Test. Despite the freeze, BLHeli_32 remains stable and fully functional, with modern open-source alternatives like AM32 taking over development.
Bluejay
Bluejay is open-source firmware for 8-bit hardware that adds modern features like bidirectional DShot, adjustable output PWM frequency, and custom startup tones. It flashes easily over existing BLHeli_S hardware (with web-based flashing) and is increasingly popular thanks to RPM support.
AM32

AM32 is an open-source, 32-bit firmware developed as a free alternative to BLHeli_32. It offers similar features (telemetry, bidirectional DShot, precise control) without licensing limits, with broad MCU support and options for customisation.