Nastavení Betaflight
Nejpoužívanější firmware pro řidicí jednotky na závodních FPV koptérách je Betaflight. Pro nastavení řidicí jednotky s Betaflight firmwarem a update firmware se používá Betaflight Configurator (desktop) nebo Betaflight App ve webovém prohlížeči. V této kapitole si projdeme, jak nastavit řidicí jednotku s Betaflightem a k čemu jednotlivé funkce jsou. Příklad je postavený na desce iFlight SucceX-E F4 V2.1, ale principy platí obecně. Poznámka: F4 cíle jsou dnes považované za „legacy“; pokud stavíte nový dron, zvažte desku s procesorem F7/H7 kvůli výkonové rezervě a dlouhodobé podpoře. O konkrétním zapojení se vždy řiďte schématem zapojení desky.
Nejdříve si stáhněte a nainstalujte aktuální verzi Betaflight Configuratoru nebo použijte webovou aplikaci (V chromium-based prohlížeči). Po spuštění se zobrazí úvodní obrazovka.
Po levé straně jsou záložky konfigurátoru. Changelog a Privacy Policy můžete přeskočit. V záložce Documentation & Support jsou odkazy na další informace. Kliknutím na Firmware Flasher otevřete rozhraní pro nahrání firmware do řídicí jednotky. Vpravo nahoře volíte sériovou linku (COM), ke které je připojená řidicí jednotka. Rychlost (baudrate) ponechte 115200. Tlačítkem Connect se připojíte do řidicí jednotky a můžete začít nastavovat. Tlačítko Update/Flash Firmware vás přepne na nahrávání nového firmware.
Doporučení: Pokud používáte Windows a deska se nepřepne do režimu DFU automaticky, doinstalujte ovladač přes ImpulseRC Driver Fixer nebo Zadig (WinUSB). Do „boot/DFU“ režimu lze desku dostat i podržením tlačítka BOOT při připojení USB.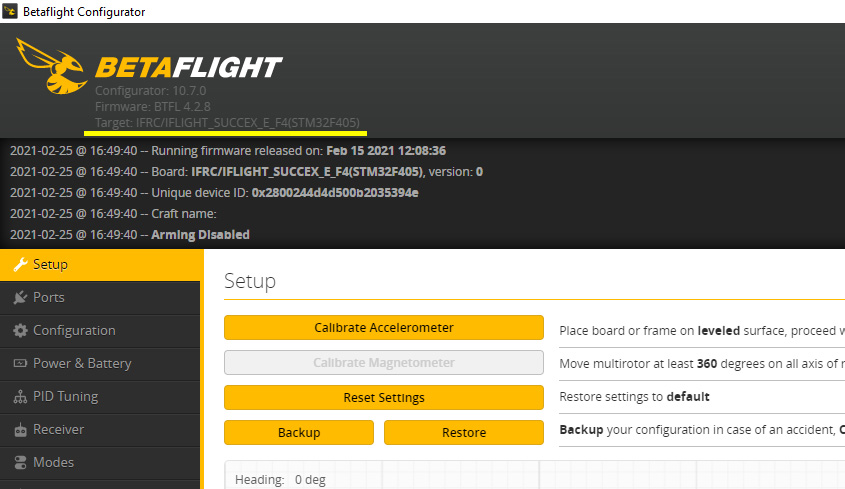
Při vybalení nové řidicí jednotky doporučujeme nahrát aktuální stabilní verzi Betaflightu. Nejprve zjistěte Target (název cíle) – je uveden v levém horním rohu po připojení (Connect) spolu s verzí firmware.

Potom je potřeba vybrat funkce které budeme reálně využívat, v novějších verzích betaflightu se totiž všechny funkce už nevejdou do paměti řídící jednotky a musíme si tedy vybrat co vynecháme. Například na koptéře s digitálním video přenosem nepotřebujeme "OSD (Analog)".
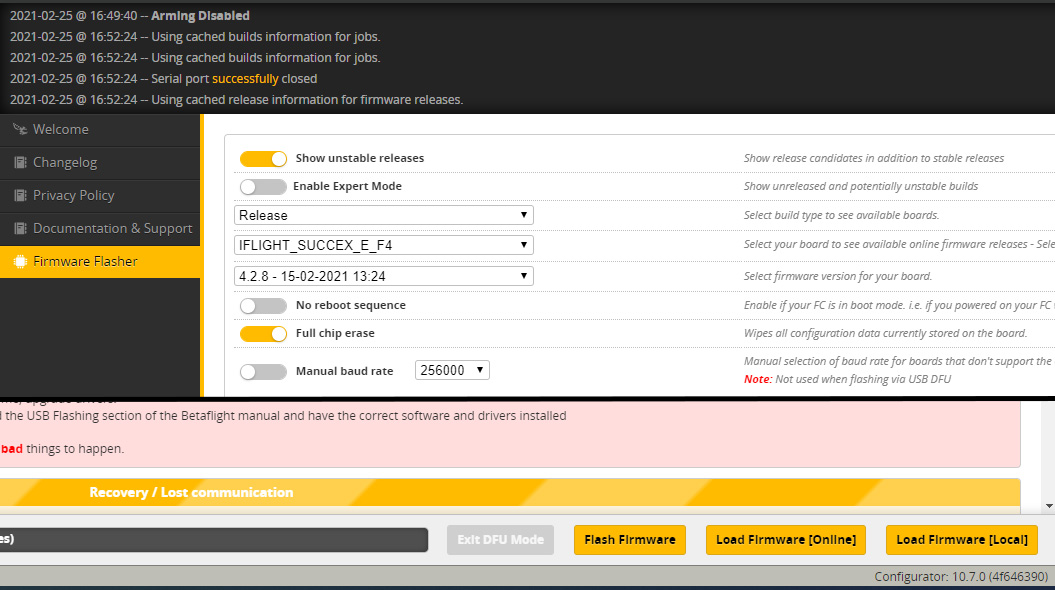
Nyní klikněte na Update/Flash Firmware a nahrajte nový firmware. Po výběru správného Targetu a verze klikněte na Load Firmware [Online] a poté Flash Firmware. Volba Full chip erase vymaže staré nastavení a je doporučená při přechodu na novou hlavní verzi. Poznámka: U novějších verzí je vyžadována odpovídající verze Configuratoru, jinak se některé volby nezobrazí správně
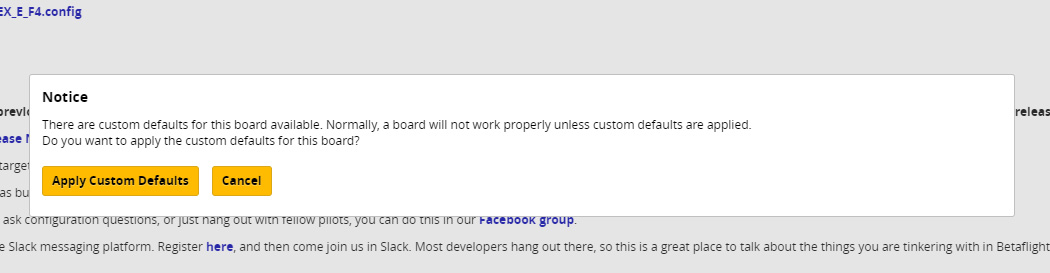
Pokud se firmware nahrál úspěšně, připojte se a pokračujte v nastavení. Vždy nastavujte bez vrtulí a ideálně bez připojené baterie (pokud ji nepotřebujete). Po prvním připojení zvolte Apply Custom Defaults.
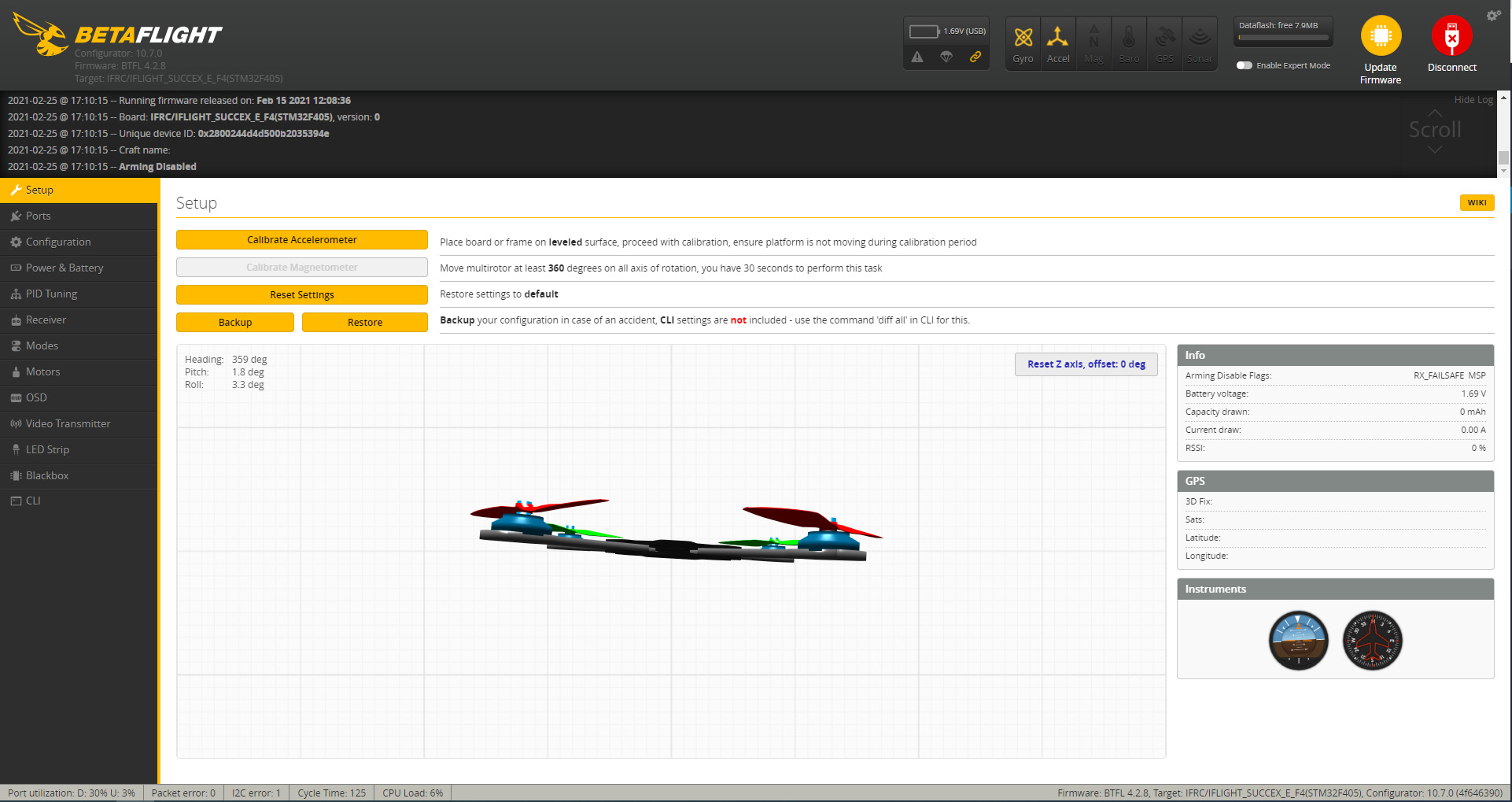
V horní liště vidíte napětí (pokud je připojena baterie), dostupné senzory (gyro/acc) a zaplnění interní paměti pro Blackbox. Záložka Setup slouží ke kontrole orientace desky (3D model se musí naklánět stejně jako koptéra) a ke kalibraci akcelerometru (Calibrate Accelerometer). Najdete zde i Arming Disable Flags – důvody, proč nejde armovat.
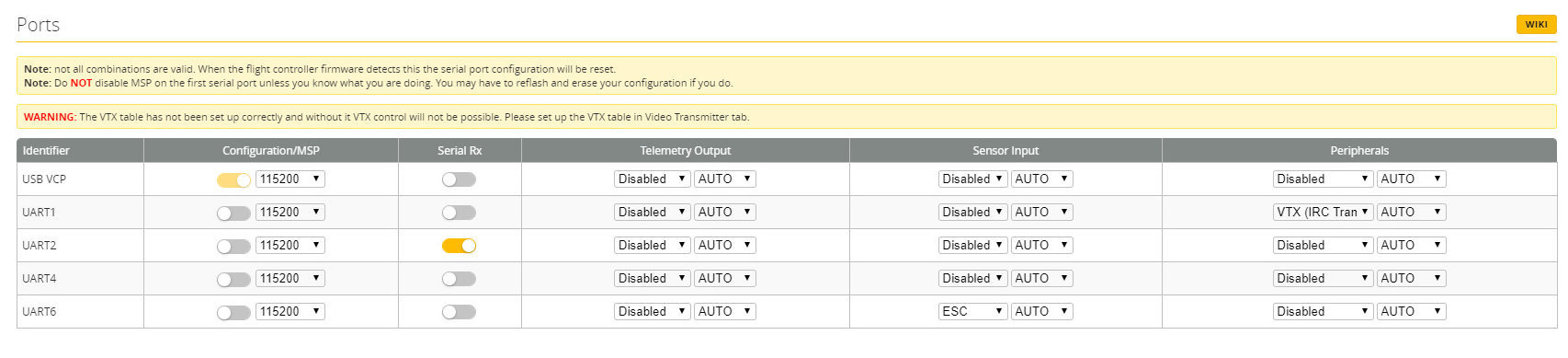
Ports: zde přiřazujete zařízení k UARTům. MSP používejte pro spojení s konfigurátorem a pro MSP DisplayPort (digitální OSD do DJI/Walksnail/HDZero). Serial RX povolte u UARTu, na kterém je RC přijímač (CRSF pro Crossfire/ExpressLRS, SBUS/FPort pro FrSky, IBUS pro FlySky). Telemetry Output zapněte, pokud chcete posílat telemetrii do rádia (CRSF/FPort). Sensor Input slouží pro GPS nebo ESC telemetrii. Peripherals použijte pro ovládání analogového VTX (IRC Tramp/SmartAudio).
Board and Sensor Alignment: pokud je FC otočená kvůli USB/přístupnosti, nastavte pootočení (nejčastěji Yaw Degrees). V Arming zvolte maximální náklon pro armování (180° = vypnuto).


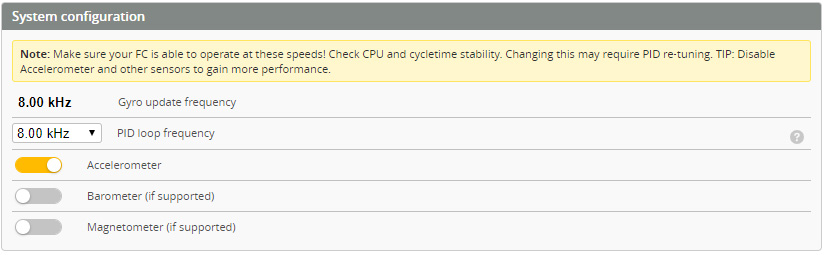
System configuration: nastavení vzorkovací frekvence gyroskopu a frekvence PID loopu (systému, který se stará o odpověď koptéry na vnější vlivy, jako vítr a její reakce na pohyb kniplů). Pro F7/F4 desky obvykle 8k/8k. Akcelerometr ponechte zapnutý, pokud používáte Angle/Horizon režimy; jinak ho lze vypnout. Barometr/magnetometr podle výbavy – magnetometr se u koptér často nepoužívá kvůli rušení.
Receiver: zvolte Serial (via UART) a protokol. Pro ExpressLRS i Crossfire vyberte CRSF. Zkontrolujte mapování kanálů (Channel Map) a rozsahy (1000–2000). RSSI je obvykle posíláno digitálně přes CRSF, takže RSSI_ADC nechte vypnuto. 

GPS: pro GPS Rescue (záchrana) aktivujte GPS, vyberte protokol (nejčastěji UBLOX) a po prvních letových testech pečlivě nastavte výšku a rychlosti návratu. TIP: před ostrým létáním ověřte chování Rescue v bezpečném prostoru s dostatečnou výškou. 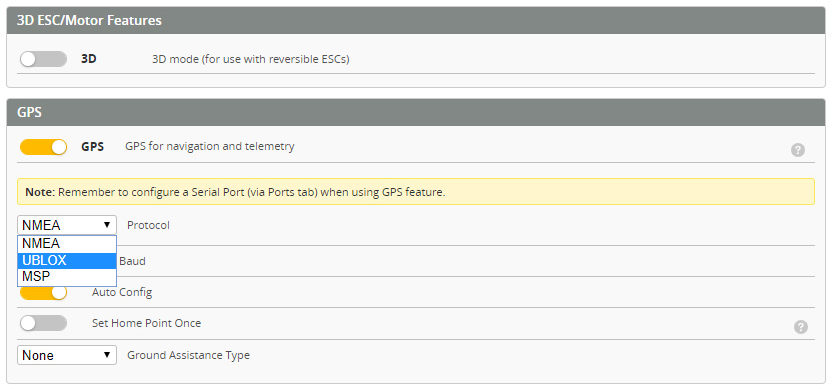
Other Features: TELEMETRY (pro data do rádia), LED_STRIP (adresovatelné LED), SOFTSERIAL (virtuální UARTy, jen pro pomalejší periferie), DYNAMIC_FILTER (ponechte zapnutý). VTX PIT MODE nastavte pro práci na stole/na eventech. 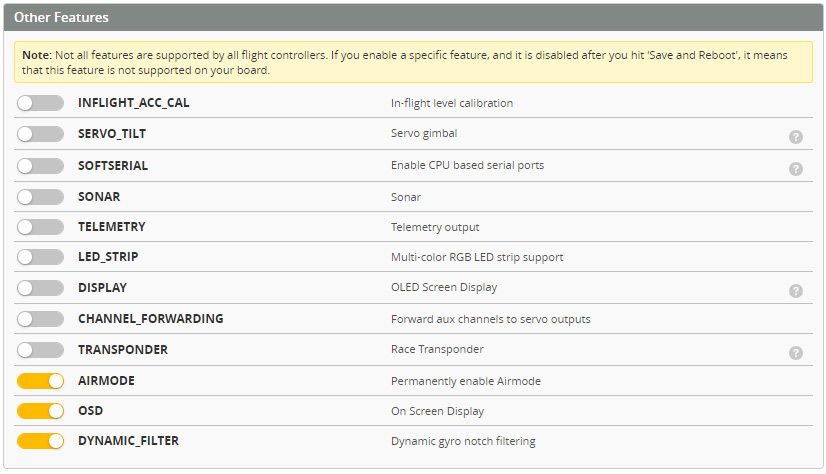
DShot Beacon/Beeper: pokud nemáte aktivní pípák, lze pískat motory (DShot Beacon). Užitečné je i nastavení výstrah v Beeper Configuration. 
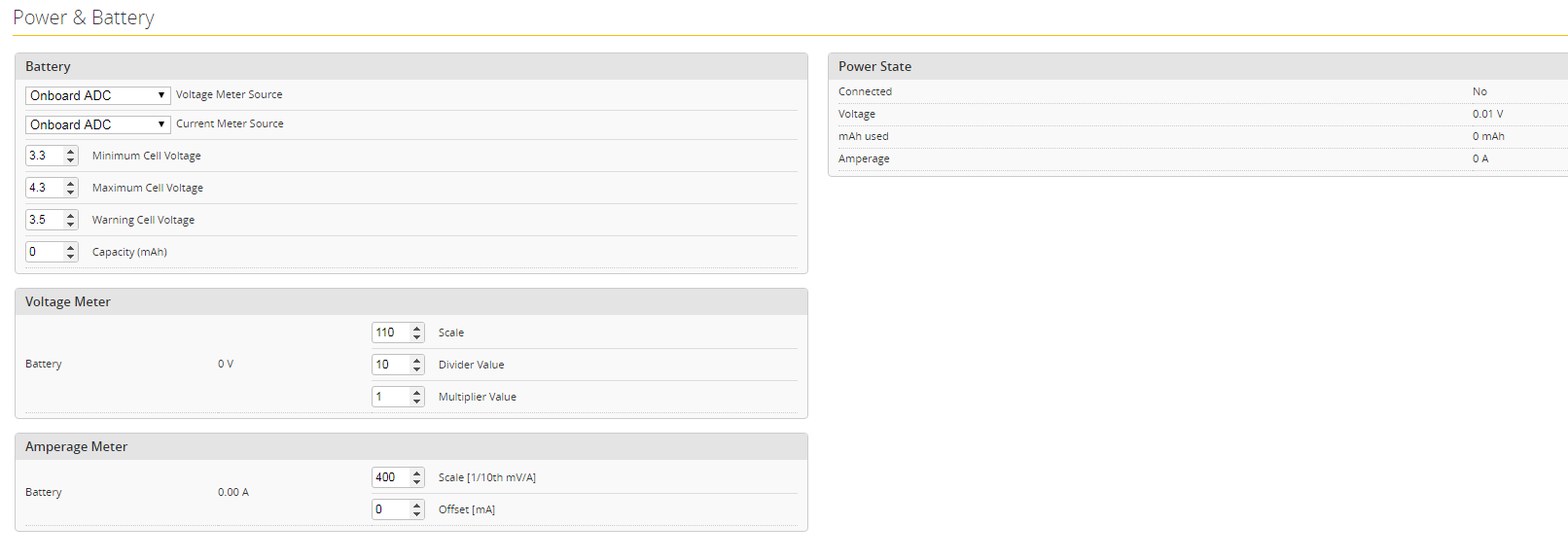
Power & Battery: pro měření napětí zvolte zdroj (Onboard ADC nebo telemetrie z ESC). Proud měřte přes Onboard ADC (CUR pin), ESC Sensor (telemetrie) nebo Virtual (odhad dle plynu). Nastavte prahové napětí na článek a kapacitu (mAh) pro varování. V Voltage/Amperage Meter kalibrujte napětí a proud (porovnáním s multimetrem/nabíječkou).
PID Tuning: u moderních verzí využijte Presets (přednastavené tuny pro velikosti 2–7", různé motory/vrtule i digitální systémy). Základní výchozí hodnoty létají velmi dobře; jemné ladění provádějte až po ověření montáže, tuhosti rámu a filtrů. Malé 2–3" často těží z mírného snížení Master Multiplier. 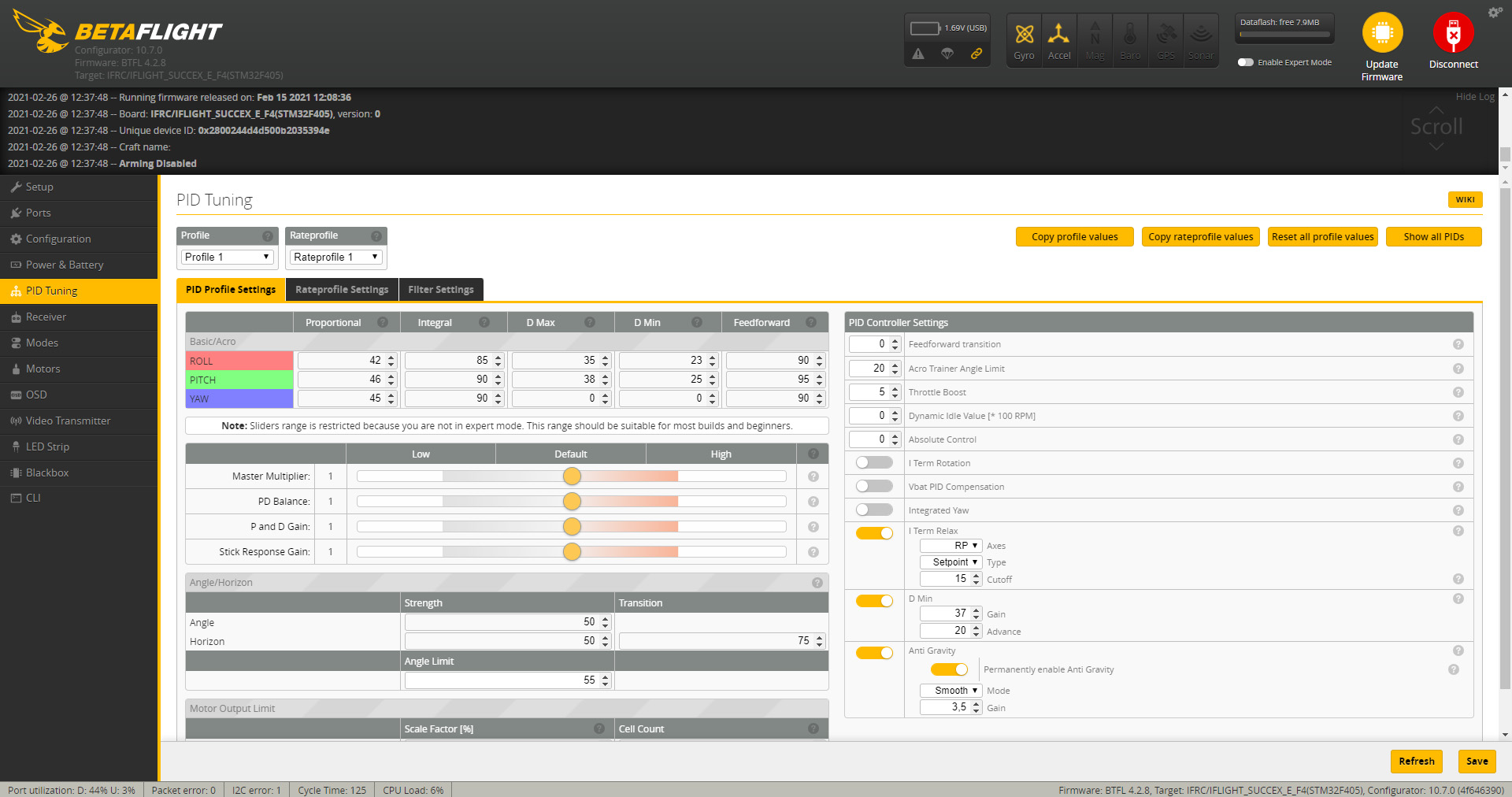
Rates: nastavují citlivost na kniplech. Začněte výchozími hodnotami. Throttle Limit je skvělý pro začátečníky; Throttle Expo a Mid vám zjemní střed. 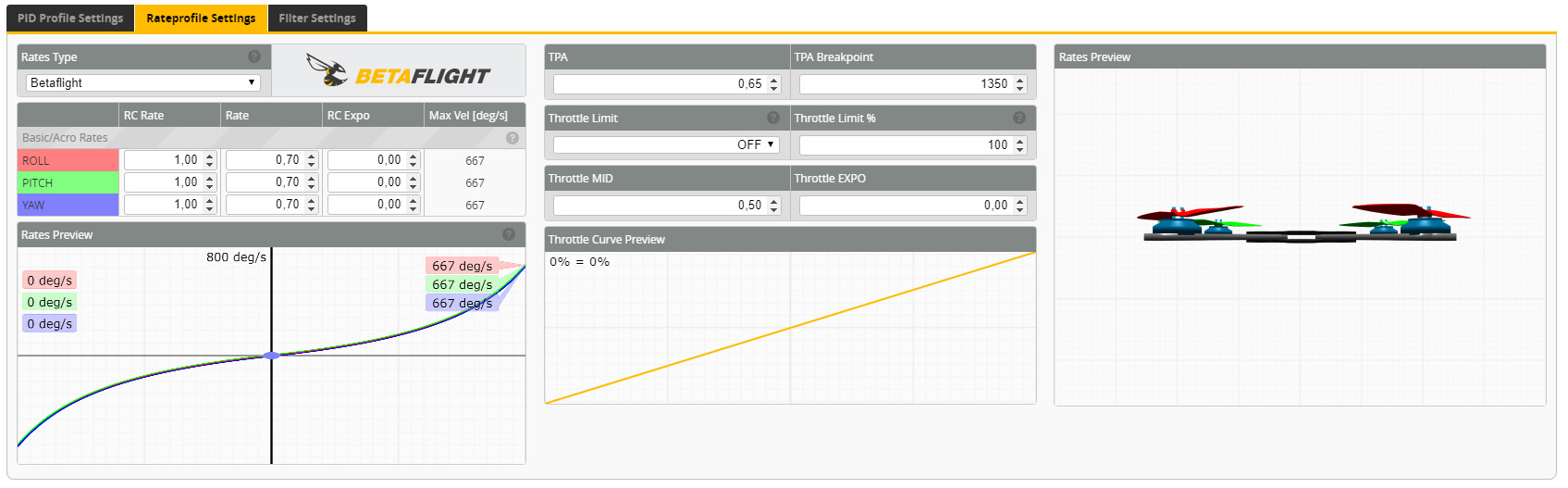
Filters: pokud si nejste jisti, ponechte Dynamic Notch a RPM filtering na výchozích hodnotách. Špatně nastavené filtry mohou zničit motory/ESC.
Receiver: zkontrolujte, že se kanály hýbou, mapování odpovídá vysílačce a že máte správně nastavené prahy (Stick Low/High). RC Smoothing ponechte default. 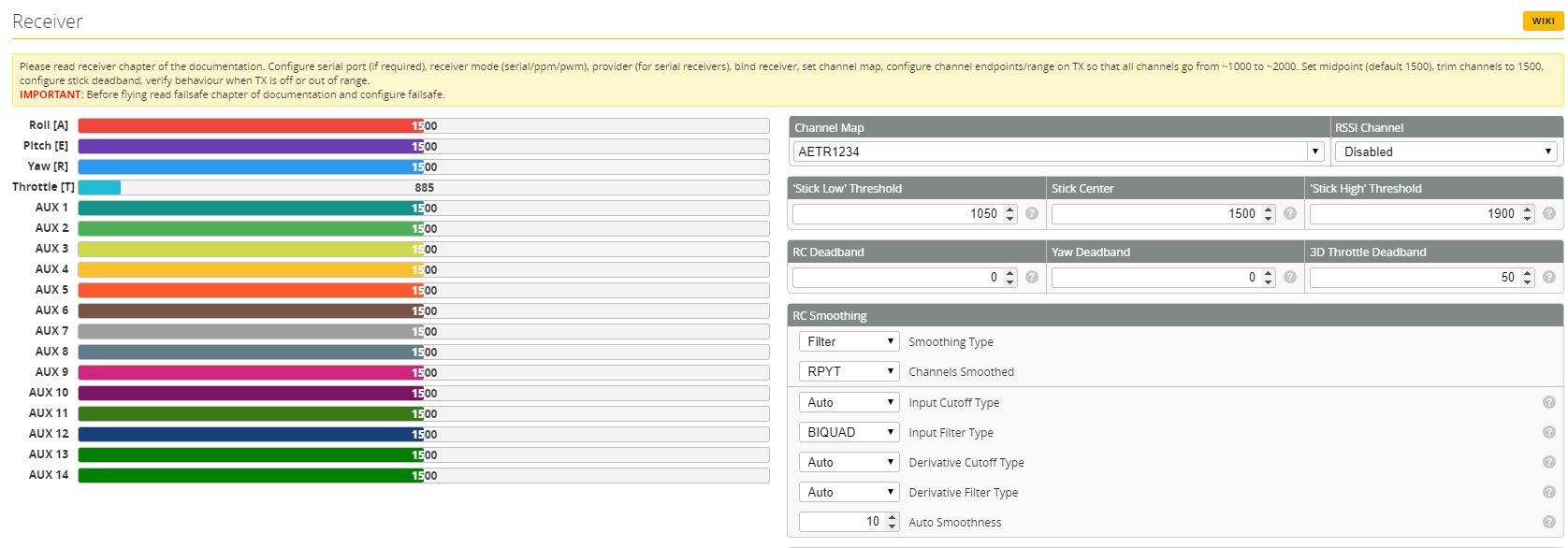
Modes: nastavte hlavně ARM, BEEPER, případně ANGLE (na první lety) a FLIP OVER AFTER CRASH (turtle mode). AIR MODE mějte trvale zapnutý (v Configuration). Další módy (PREARM, GPS RESCUE, VTX PIT MODE atd.) přidejte podle potřeby. 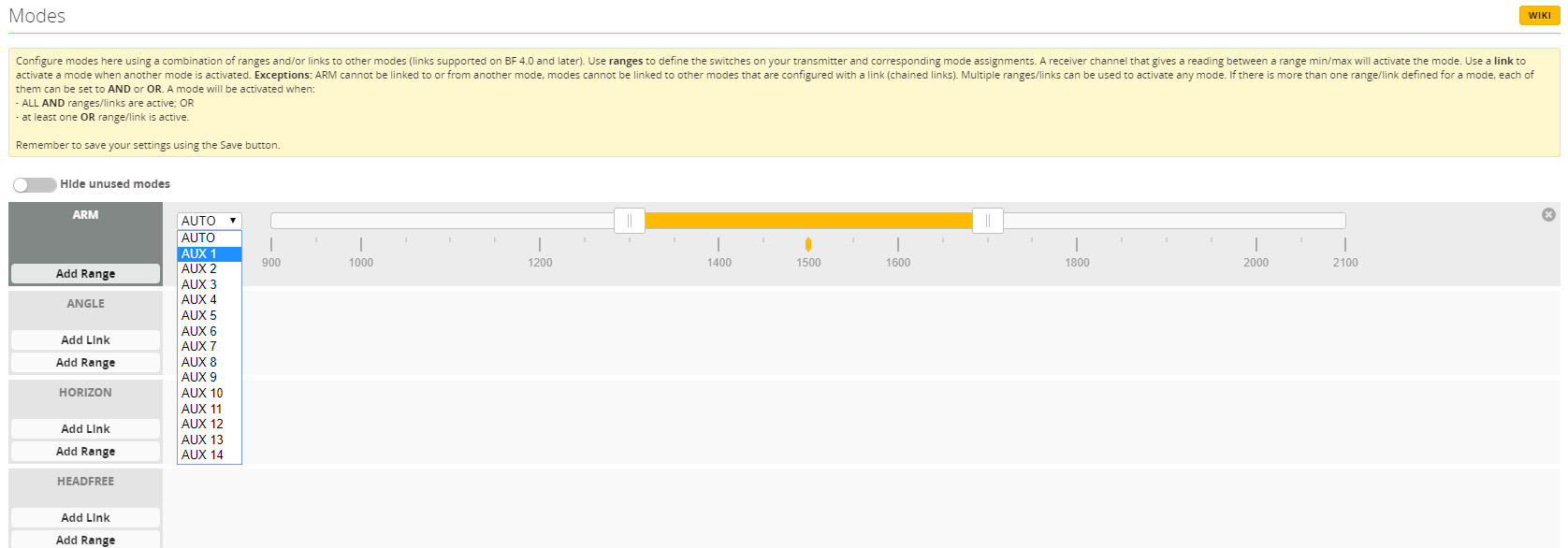
Motors: Vyberte typ stroje (většinou kvadrokoptéra"a případně opačnou rotaci motorů.
V sekci ESC/Motor zvolte DShot600 a zapněte Bidirectonal DShot (pro RPM filtering). Uveďte počet magnetů na motoru (typicky 14 u 5" a u menších často 12), aby otáčky opdovídaly realitě. ESC_SENSOR aktivujte, pokud používáte telemetrii regulátorů. Funkci AirMode ponechte zapnutou (manévrovatelnost při nízkém plynu). MOTOR_STOP s AirMode kombinovat nelze.
záložka motors slouží také ke zkoušce. Vrtule vždy dole! Ověřte pořadí a směr otáčení. S Bidirectional DShot uvidíte i otáčky a chybovost telemetrie.

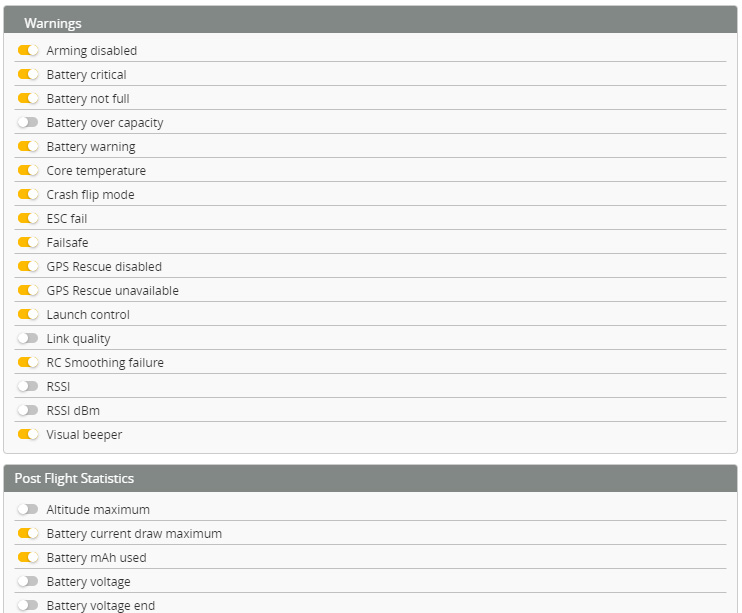
OSD: pro digitál (DJI/Walksnail/HDZero) aktivujte MSP DisplayPort na správném UARTu. Zobrazujte jen podstatné údaje: napětí, čas, varování, RSSI/LQ, u GPS i směr domů, počet satelitů, rychlost a vzdálenost. Nastavte si profily a prahy alarmů. 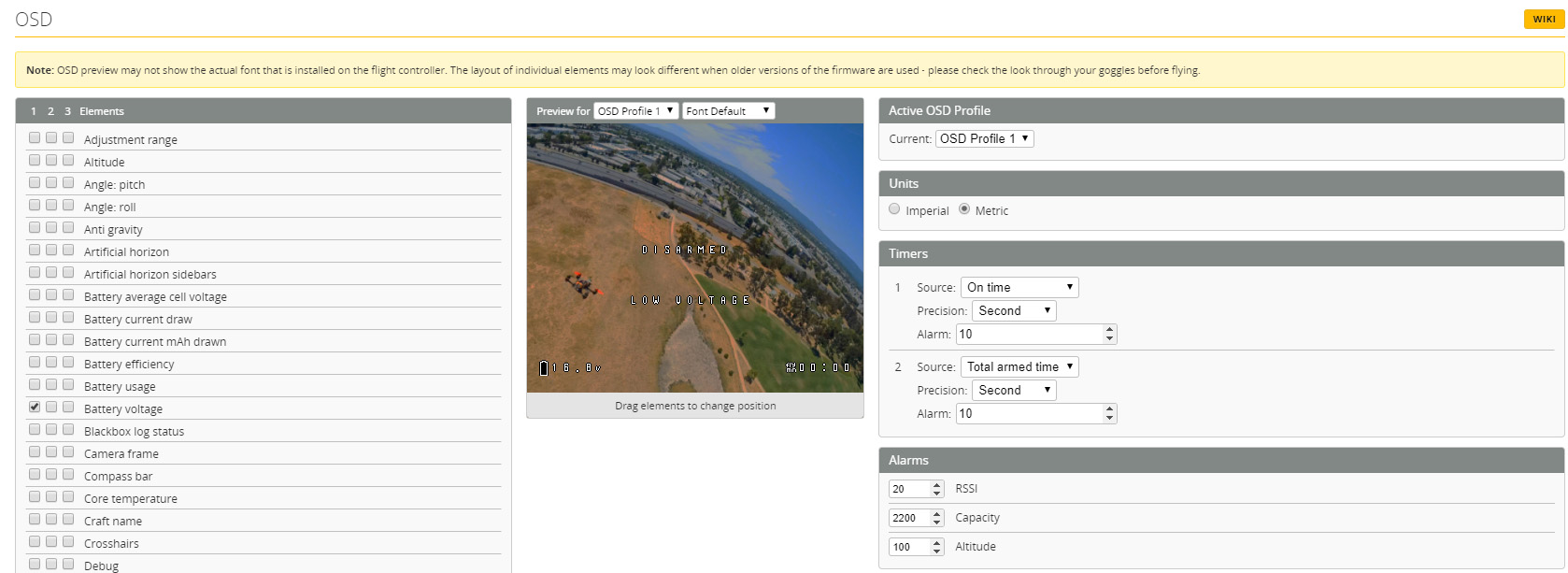
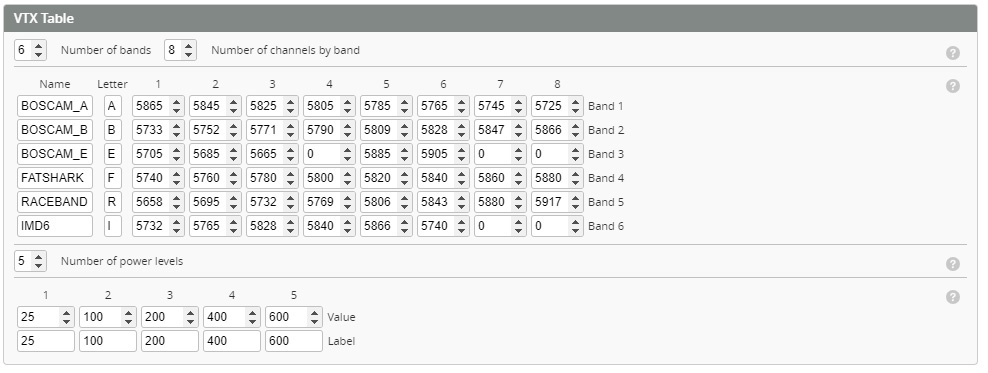
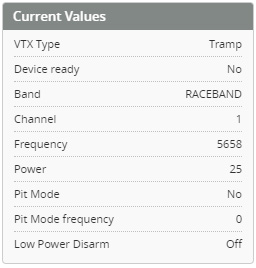
Video Transmitter: pro analog nahrajte správnou VTX Table a ovládejte výkon/kanál přes IRC Tramp nebo SmartAudio. Využijte Low Power Disarm a PIT Mode. Poznámka: U digitálních systémů (DJI/Walksnail/HDZero) se kanály/výkon nastavují v brýlích a VRX – VTX tabulky v Betaflightu pro ně nepoužívejte. 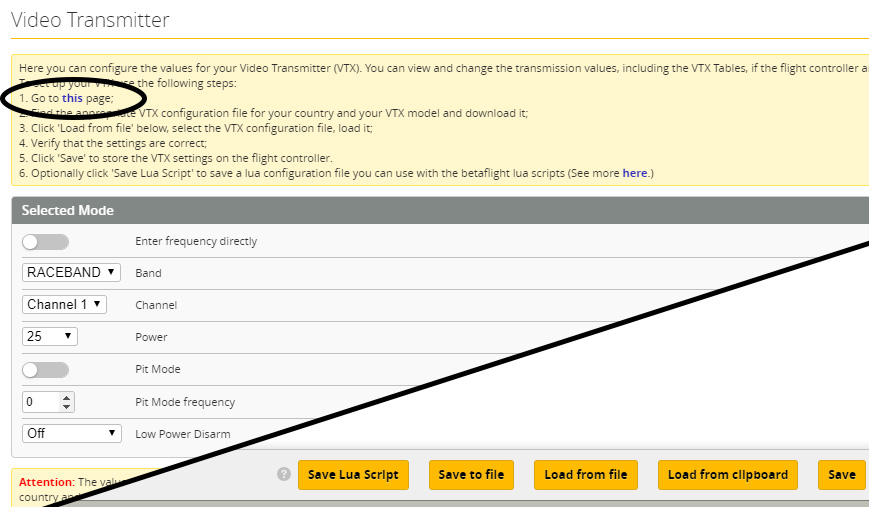

Blackbox: logování na interní Flash/SD kartu. Pro ladění filtrů/PID doporučujeme vzorkování ≥ 2 kHz. Mass Storage (pokud deska podporuje) usnadní stahování záznamů.

CLI: pokročilé nastavení, mapování resource a nové funkce, které ještě nemají GUI. Před změnami si uložte diff all/dump. 
Bezpečnostní shrnutí: vrtule vždy dole při nastavování; první lety dělejte s konzervativním výkonem (Throttle Limit), ověřte směr motorů, failsafe, GPS Rescue jen po otestování a se satelity „3D Fix“. U digitálu nezapomeňte na MSP DisplayPort pro OSD a správný UART.
Další díl: Nastavení BLHeli32/AM32